
刘铠源和外公
位移和路程都与初速度正比
qiutopIA:球静止摩擦系数的条件
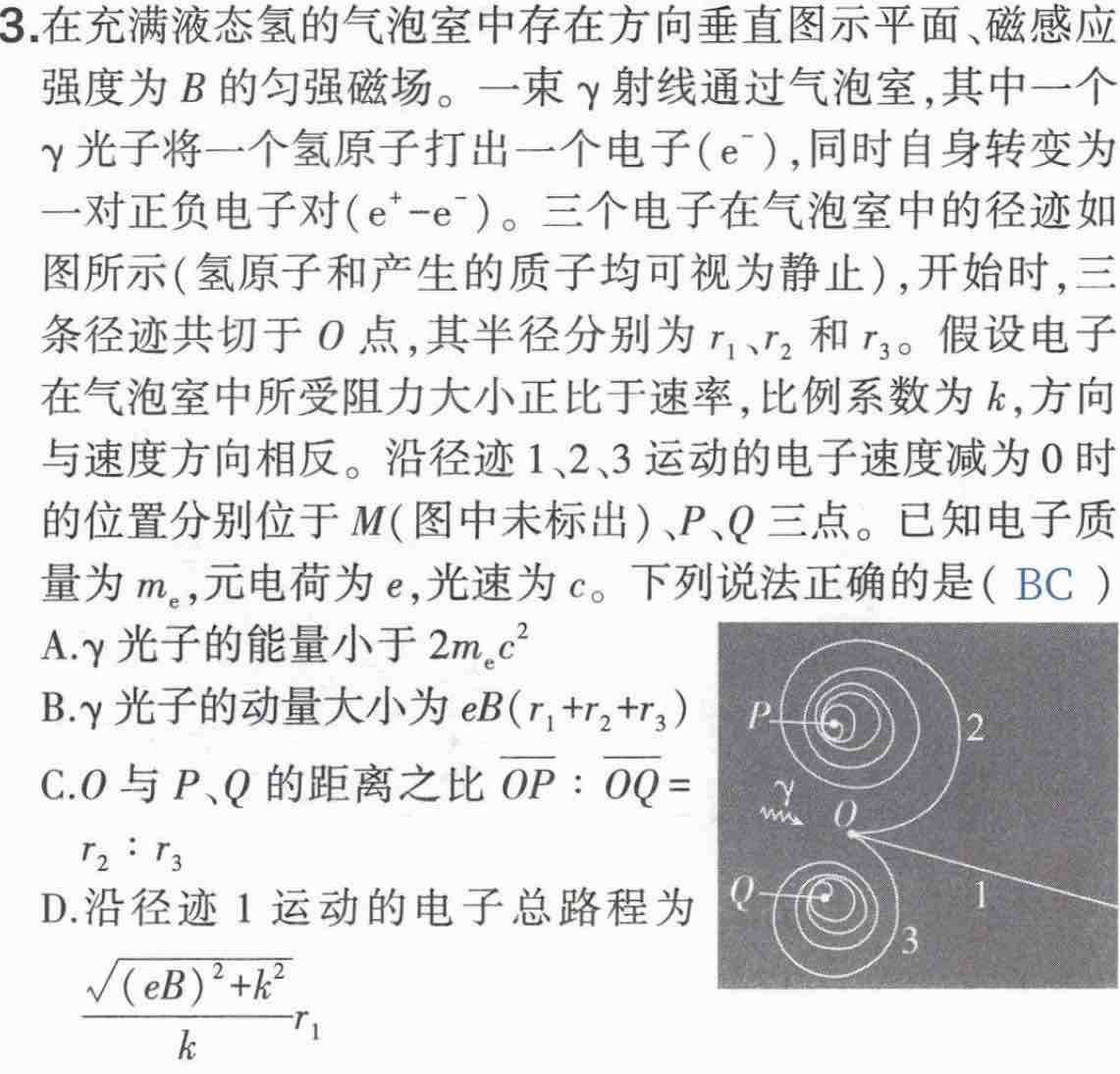
 四个完全相同的小球,三个在桌面,两两接触(用橡皮筋捆住),第四个小球放在正上方(当成光滑;不光滑,从对称性上看不受摩擦?),求底下每个小球对顶部小球的支持力。($\frac{\sqrt{6}}{6}mg$)
对这道很经典的立体受力分析的题目印象很深,自然想到摩擦系数的问题,正好练习册就有这个题目,和当年的想法一致。保持静止的摩擦系数最下为$\frac{\sqrt{2}}{8}$。这个题目的问题就是“不光滑,从对称性上看不受摩擦?”疏忽了底部小球的共点力平衡的条件,顶部小球必然和底部小球有静摩擦。
四个完全相同的小球,三个在桌面,两两接触(用橡皮筋捆住),第四个小球放在正上方(当成光滑;不光滑,从对称性上看不受摩擦?),求底下每个小球对顶部小球的支持力。($\frac{\sqrt{6}}{6}mg$)
对这道很经典的立体受力分析的题目印象很深,自然想到摩擦系数的问题,正好练习册就有这个题目,和当年的想法一致。保持静止的摩擦系数最下为$\frac{\sqrt{2}}{8}$。这个题目的问题就是“不光滑,从对称性上看不受摩擦?”疏忽了底部小球的共点力平衡的条件,顶部小球必然和底部小球有静摩擦。
正在加载 3D 物理引擎…
感谢11班邵涵宇、刘益鸣和胡琛,三位帅气、聪慧和勇敢的小朋友,他们意识到前面问题的漏洞,并给出一种答案(1班那煦东在课堂笔记上有提出,我的第二个失误是没有注意到)。也表扬1班陈德运同学,他力矩的方法很赞(两个静摩擦力等大),简化不少运算。 当所有接触面摩擦系数同的前提下,满足稳定的最小摩擦系数为$\sqrt{3}-\sqrt{2}$;如果球体之间摩擦系数足够大,满足稳定的条件,地面摩擦系数最小$\frac{\sqrt{3}-\sqrt{2}}{4}$
 唐梓淳同学建议,底下三个球改成三个半球。半径相同(且最下三个半球质量集中在球心处,质量为球体一半···相当于质量集中在一端的轻杆支撑),地面摩擦系数最小是$\frac{\sqrt{2}}{5}$
唐梓淳同学建议,底下三个球改成三个半球。半径相同(且最下三个半球质量集中在球心处,质量为球体一半···相当于质量集中在一端的轻杆支撑),地面摩擦系数最小是$\frac{\sqrt{2}}{5}$ 
云朵的追逐

多带一个班的课,生活质量下降了不少哈哈哈~~




